Jaw Flexible Coupling
Rokee is Jaw Flexible Coupling Manufacturer, Customizable according to the jaw flexible coupling drawings provided by the customer, Support Export.
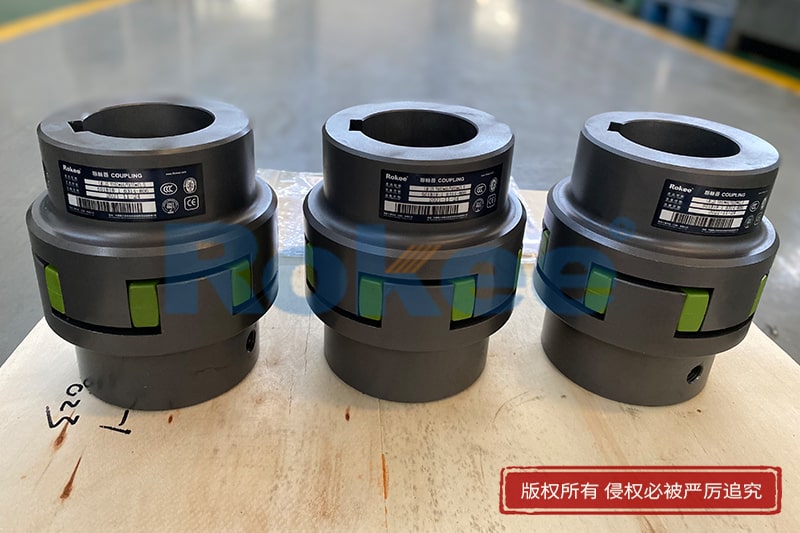

Jaw Flexible Coupling is composed of two semi-couplings with convex claws and a plum-shaped flexible non-metallic element whose hardness can be adjusted. By embedding the plum-shaped flexible element into the two semi-couplings to realize the connection, it has the characteristics of compensating the relative displacement of the two axes, reducing vibration and buffering, simple structure and easy maintenance without lubrication.
![LM/ML Plum-shaped Flexible Coupling,Jaw Flexible Coupling]()
LM/ML Plum-shaped Flexible Coupling
Basic Type
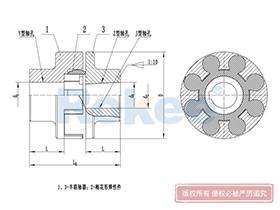
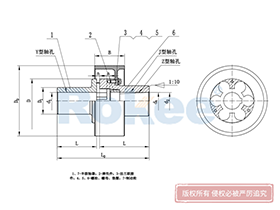
LM Plum-shaped Flexible Coupling is the basic form of this series of couplings.View More![LMD/MLZ Plum-shaped Flexible Coupling,Jaw Flexible Coupling]()
LMD/MLZ Plum-shaped Flexible Coupling
Single Flange
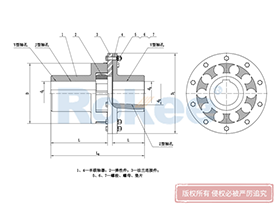
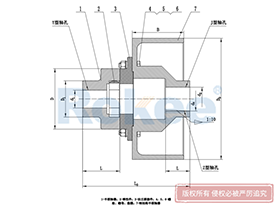
LMD Plum-shaped Flexible Coupling is added with transition connection, which eliminates the need of axially moving the semi-coupling when replacing the elastomer.View More![LMS/MLS Plum-shaped Flexible Coupling,Jaw Flexible Coupling]()
LMS/MLS Plum-shaped Flexible Coupling
Double Flange
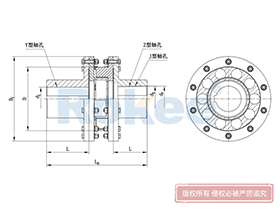
LMS Plum-shaped Flexible Coupling adopts double transition flange connection, which eliminates the need of axially moving the semi-coupling when replacing the elastomer.View More![LMZ-I/MLL-I Plum-shaped Flexible Coupling,Jaw Flexible Coupling]()
LMZ-I/MLL-I Plum-shaped Flexible Coupling
Split Type, With Brake Wheel
LMZ-I Plum-shaped Flexible Coupling adopts split brake wheel design, suitable for situations where braking is required.View More![LMZ-II/MLL-II Plum-shaped Flexible Coupling,Jaw Flexible Coupling]()
LMZ-II/MLL-II Plum-shaped Flexible Coupling
Integral, With Brake Wheel
LMZ- II Plum-shaped Flexible Coupling adopts integral brake wheel design, suitable for situations where braking is required.View More![LMPK/MLPK Plum-shaped Flexible Coupling,Jaw Flexible Coupling]()
LMPK/MLPK Plum-shaped Flexible Coupling
Split Type, With Brake Discs
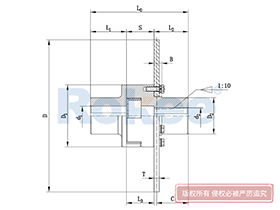
LMPK Plum-shaped Flexible Coupling adopts split brake disc design, suitable for situations where braking is required and eliminating the need of axially moving the semi-coupling when replacing the elastomer.View More
In the realm of mechanical power transmission, couplings serve as the critical link between rotating shafts, ensuring the efficient transfer of torque while accommodating inevitable misalignments and mitigating operational vibrations. Among the diverse range of coupling technologies available, jaw flexible couplings stand out for their unique combination of simplicity, reliability, and versatility. Widely adopted across industrial, automotive, and precision automation sectors, these couplings have become indispensable components in systems where both torque transmission efficiency and mechanical component protection are paramount.
1. Fundamental Concepts and Core Functions of Jaw Flexible Couplings
A jaw flexible coupling is a type of elastomeric coupling designed primarily to transmit torque between two coaxial shafts while compensating for three common types of shaft misalignment: angular, parallel, and axial. Unlike rigid couplings that require precise shaft alignment and offer no vibration damping, jaw flexible couplings incorporate an elastic element that enables flexibility, making them suitable for a wide range of dynamic operating conditions. The core functions of these couplings extend beyond mere torque transmission; they also dampen torsional vibrations, absorb shock loads, and protect connected equipment such as motors, gearboxes, and pumps from excessive stress and premature failure.
At their essence, jaw flexible couplings operate on the principle of torque transmission through compression of the elastic element. When the driving shaft rotates, the jaws of the driving hub exert compressive force on the elastic element, which in turn transfers this force to the jaws of the driven hub, causing the driven shaft to rotate. This compression-based torque transmission mechanism distinguishes jaw couplings from shear-type elastomeric couplings, where the elastic element transmits torque through twisting. The compression design contributes to the jaw coupling's characteristic robustness and ability to handle moderate to high torque loads, while the elastic element provides the necessary flexibility to accommodate misalignments and vibrations.
2. Structural Composition and Design Variations
2.1 Basic Structural Components
All jaw flexible couplings share a fundamental three-component structure: two metallic hubs and an elastomeric insert, commonly referred to as a "spider" due to its typical asterisk-like shape. The metallic hubs feature protruding jaws—usually two to six in number—that are evenly spaced around the circumference of the hub's mating face. These jaws are designed to interlock with the lobes of the spider, creating a secure yet flexible connection between the two hubs. The hubs are typically mounted on the ends of the shafts to be connected, using clamping bolts, setscrews, or keyway connections to ensure a tight fit and prevent slippage during operation.
The spider, which sits between the two hubs, is the key flexible component that enables the coupling's core functions. Its lobes fit precisely into the gaps between the jaws of the two hubs, acting as the interface for torque transmission. The design of the spider—including its material, hardness, and geometry—directly influences the coupling's torque capacity, vibration damping capability, misalignment tolerance, and service life. Additionally, the spider's design often incorporates features that facilitate easy installation and replacement, such as radial access for quick removal without disassembling the entire coupling assembly.
2.2 Design Variations
Jaw flexible couplings are available in two primary design variations: straight-tooth and curved-tooth designs, each tailored to specific application requirements. Straight-tooth jaw couplings feature jaws with flat, linear surfaces, allowing the spider to be installed and removed radially. This design simplifies maintenance and replacement of the spider, as it can be slid into place without axial movement of the shafts. Some straight-tooth designs also offer a "non-fail-safe" option, where the spider transmits torque in shear rather than compression; in such cases, failure of the spider results in a complete loss of torque transmission, which may be desirable in applications where equipment damage must be avoided by stopping operation immediately.
Curved-tooth jaw couplings, by contrast, feature jaws with a curved profile that mates with corresponding curves on the spider lobes. This design offers several advantages, including higher torsional stiffness and the ability to maintain a zero-backlash fit when paired with a stiff elastomeric material. Zero backlash is critical in precision motion control applications, such as CNC machine tools and robotics, where accurate positioning and synchronization are essential. The curved profile also distributes contact forces more evenly across the spider, reducing localized stress and extending the service life of the elastic element. Additionally, some specialized designs, such as the Oldham coupling—a variation of the jaw coupling—feature an elongated spider that allows for greater radial misalignment compensation, making them suitable for applications where shaft offset is significant.
3. Material Selection for Jaw Flexible Couplings
The performance and durability of jaw flexible couplings are heavily dependent on the materials used for both the metallic hubs and the elastomeric spider. Material selection must be guided by the application's operating conditions, including torque requirements, operating temperature, speed, environmental factors, and chemical exposure. A well-chosen material combination ensures optimal performance, minimizes maintenance, and extends the coupling's service life.
3.1 Hub Materials
Metallic hubs are typically manufactured from materials that offer high strength, rigidity, and resistance to wear and fatigue. The most common materials include:
- Carbon Steel: Widely used for general-purpose applications, carbon steel (such as 45-grade steel) offers excellent torque capacity and durability at a cost-effective price point. It is suitable for moderate to heavy-duty applications, including industrial pumps, compressors, and conveyor systems.
- Aluminum Alloy: Preferred for lightweight applications where reduced inertia is critical, such as robotics, automation systems, and high-speed machinery. Aluminum alloy hubs offer good corrosion resistance and thermal conductivity, making them suitable for applications with moderate temperature variations.
- Stainless Steel: Utilized in harsh environments where corrosion resistance is essential, such as food processing, chemical processing, and marine applications. Stainless steel hubs offer excellent durability and resistance to moisture, chemicals, and extreme temperatures, though they come at a higher cost than carbon steel or aluminum.
- Cast Iron: Used in low to moderate torque applications where cost is a primary concern. Cast iron hubs offer good vibration damping properties but are less durable than steel or aluminum and may be prone to cracking under high shock loads.
3.2 Spider Materials
The elastomeric spider is the most critical material selection factor, as it directly influences the coupling's flexibility, vibration damping, torque capacity, and environmental resistance. Common spider materials include:
- Buna-N Rubber: A standard material for general-purpose applications, Buna-N (nitrile rubber) offers excellent flexibility, shock absorption, and oil resistance. It operates effectively within a temperature range of -40°C to 100°C, making it suitable for most industrial environments. Buna-N spiders are cost-effective and widely available, making them the default choice for many applications.
- Urethane: Offering approximately 50% higher torque capacity than Buna-N, urethane spiders provide good chemical resistance and durability. They operate in a temperature range of -35°C to 70°C and are suitable for applications requiring higher torque transmission and moderate chemical exposure, such as in automotive and industrial machinery.
- Hytrel: A thermoplastic elastomer that combines the flexibility of rubber with the strength of plastic. Hytrel spiders offer three times the torque capacity of Buna-N, excellent temperature resistance (-50°C to 120°C), and superior oil and chemical resistance. They are ideal for high-performance applications, including precision motion control, renewable energy systems, and harsh industrial environments.
- Bronze: Used exclusively for high-torque, low-speed applications (up to 250 rpm). Bronze spiders offer exceptional temperature resistance (-40°C to 230°C) and chemical resistance, making them suitable for extreme environments such as steel mills and cement plants. Unlike elastomeric materials, bronze is a rigid material, so couplings using bronze spiders offer minimal vibration damping but maximum torque capacity.
When selecting a spider material, key considerations include the application's torque requirements, operating temperature range, speed, chemical exposure (such as oils, solvents, or corrosive substances), and the level of vibration damping needed. The hardness of the elastomeric material is also a critical factor; harder materials offer higher torsional stiffness and torque capacity, while softer materials provide better vibration damping and misalignment tolerance.
4. Performance Characteristics and Key Parameters
Understanding the performance characteristics of jaw flexible couplings is essential for selecting the right coupling for a specific application. The key performance parameters include torque capacity, misalignment tolerance, torsional stiffness, vibration damping, speed rating, and fail-safe capability.
4.1 Torque Capacity
Torque capacity refers to the maximum torque that a coupling can transmit without failure. This parameter is determined by the material and design of both the hubs and the spider. The design torque—calculated as the product of the nominal torque (derived from the application's power and speed) and an application factor—must be less than the coupling's rated torque. Application factors account for dynamic loads, shock loads, and operating conditions; for example, applications with frequent start-stop cycles or reversing loads require a higher application factor than steady-state applications.
Spider material has a significant impact on torque capacity. As noted earlier, Hytrel and bronze spiders offer much higher torque capacities than Buna-N or urethane. Additionally, the number of jaws and the size of the coupling also influence torque capacity; larger couplings with more jaws can transmit higher torques.
4.2 Misalignment Tolerance
Jaw flexible couplings are designed to accommodate three types of misalignment:
- Angular Misalignment: The angle between the two shafts (measured in degrees). Most jaw couplings can accommodate angular misalignment of up to 1°, though this varies by design and spider material. Curved-tooth designs typically offer slightly lower angular misalignment tolerance (0.5°) than straight-tooth designs due to their stiffer profile.
- Parallel Misalignment: The radial offset between the two shafts (measured in millimeters). Standard jaw couplings can tolerate parallel misalignment of up to 0.4 mm, with specialized designs such as Oldham couplings offering higher tolerance for radial offset.
- Axial Misalignment: The axial movement or gap between the two shafts. Jaw couplings can accommodate small amounts of axial misalignment, typically up to 1-2 mm, depending on the design.
It is important to note that excessive misalignment can significantly reduce the coupling's service life, as it increases stress on the spider and leads to premature wear. Proper shaft alignment during installation is therefore critical to ensure optimal performance.
4.3 Torsional Stiffness and Vibration Damping
Torsional stiffness refers to the coupling's resistance to torsional deformation under torque. High torsional stiffness is essential for precision motion control applications, where accurate positioning and synchronization are required. Curved-tooth designs with stiff spider materials (such as Hytrel) offer higher torsional stiffness than straight-tooth designs with softer spiders.
Vibration damping, by contrast, is the coupling's ability to absorb and dissipate torsional vibrations. This is primarily determined by the spider material; softer elastomeric materials (such as Buna-N) provide better vibration damping than harder materials (such as Hytrel or bronze). Vibration damping is critical for protecting connected equipment from fatigue damage and reducing operational noise.
There is a trade-off between torsional stiffness and vibration damping; selecting a spider material involves balancing these two characteristics based on the application's requirements. For example, CNC machine tools require high torsional stiffness for accurate positioning, while pumps and compressors benefit from better vibration damping to reduce wear on bearings and seals.
4.4 Speed Rating
The speed rating is the maximum rotational speed (measured in rpm) at which a coupling can operate safely. This parameter is determined by the coupling's design, material, and balance. High-speed applications, such as electric motors and turbochargers, require couplings with high speed ratings to avoid excessive centrifugal forces and vibration. Aluminum alloy hubs are often preferred for high-speed applications due to their lightweight, which reduces centrifugal forces.
4.5 Fail-Safe Capability
Most jaw flexible couplings are considered "fail-safe," meaning that if the spider fails or wears away, the jaws of the two hubs will interlock (like gear teeth) and continue to transmit torque. This feature is critical in applications where sudden loss of torque transmission could result in equipment damage or safety hazards, such as in conveyor systems or industrial machinery. However, fail-safe operation is not always desirable; in some precision applications, such as robotics, a spider failure should stop operation immediately to prevent damage to delicate components. In such cases, non-fail-safe designs (where the spider transmits torque in shear) are used.
5. Application Landscapes of Jaw Flexible Couplings
Jaw flexible couplings are versatile components used across a wide range of industries and applications, thanks to their compact design, ease of installation, and ability to balance torque transmission and flexibility. Below are the key application sectors where these couplings are most commonly employed:
5.1 Industrial Machinery
In industrial settings, jaw flexible couplings are widely used in pumps, compressors, conveyors, mixers, and fans. These applications often involve moderate to high torque loads, varying operating conditions, and the need to accommodate misalignments caused by thermal expansion or installation errors. For example, in pump systems, the coupling connects the motor to the pump shaft, transmitting torque while damping vibrations and compensating for misalignment, which protects the pump's bearings and seals from premature failure. In conveyor systems, the fail-safe capability of jaw couplings ensures that operation can continue temporarily in the event of spider failure, preventing costly downtime.
5.2 Automotive Industry
The automotive industry utilizes jaw flexible couplings in various components, including steering columns, drive shafts, and powertrain systems. In steering columns, the coupling provides flexibility to accommodate misalignments between the steering wheel and the steering gear, while damping vibrations to improve driver comfort. In powertrain systems, jaw couplings transmit torque between the engine and transmission, absorbing shock loads and reducing vibration. The compact design and high torque capacity of these couplings make them suitable for the space-constrained environment of automotive vehicles.
5.3 Robotics and Automation
Precision is paramount in robotics and automation systems, and jaw flexible couplings play a critical role in ensuring accurate torque transmission and positioning. Curved-tooth jaw couplings with zero backlash (using stiff Hytrel spiders) are commonly used in robotic arms, linear actuators, and CNC machine tools. These couplings accommodate small misalignments caused by assembly errors or thermal expansion, while maintaining high torsional stiffness to ensure precise synchronization of moving parts. The lightweight design of aluminum alloy hubs is also beneficial in robotics, where reduced inertia improves dynamic performance.
5.4 Renewable Energy Systems
Renewable energy applications, such as wind turbines and solar trackers, require couplings that can withstand harsh environmental conditions and accommodate misalignments caused by dynamic loads. Jaw flexible couplings are used in wind turbine nacelles to connect the generator to the gearbox, transmitting torque while damping vibrations from wind gusts. In solar trackers, the coupling connects the motor to the tracking mechanism, accommodating misalignments caused by temperature changes and wind-induced movement. The ability of jaw couplings to withstand extreme temperatures, moisture, and dust makes them suitable for these outdoor applications.
5.5 Heavy-Duty Industries
Heavy-duty industries such as steel mills, cement plants, and mining operations utilize jaw flexible couplings with bronze or Hytrel spiders to handle high torque loads and extreme temperatures. In steel mills, for example, couplings connect motors to rolling mills, transmitting high torque at low speeds while withstanding temperatures up to 230°C. The robust design of these couplings ensures reliable operation in harsh, dusty environments.
6. Maintenance Practices for Jaw Flexible Couplings
Proper maintenance is essential to ensure the optimal performance and longevity of jaw flexible couplings. Neglecting maintenance can lead to premature failure, increased downtime, and damage to connected equipment. The key maintenance practices include regular inspection, cleaning, lubrication, and timely replacement of worn components.
6.1 Regular Inspection
Inspection intervals should be determined based on the application's operating conditions, but a general recommendation is to inspect the coupling every six months or after 1000 hours of operation, whichever comes first. During inspection, the following aspects should be checked:
- Spider Condition: Check for signs of wear, tearing, cracking, or deterioration. Elastomeric spiders have signature wear patterns; for example, uneven wear may indicate misalignment, while cracking may indicate excessive temperature or chemical exposure.
- Hub Condition: Inspect the jaws for wear, chipping, or deformation. Loose or damaged jaws can reduce torque transmission efficiency and lead to premature failure.
- Fasteners: Check the tightness of clamping bolts, setscrews, or keyway connections. Loose fasteners can cause slippage, misalignment, and increased vibration.
- Shaft Alignment: Verify that the shafts are properly aligned. Misalignment is a common cause of premature coupling failure, so alignment should be checked and adjusted regularly, especially after maintenance or equipment relocation.
6.2 Cleaning
Regular cleaning is important to remove dust, debris, and contaminants that can accumulate on the coupling and accelerate wear. To clean the coupling, first, remove the spider and hubs from the shafts (if necessary). Use a soft brush or cloth to remove loose debris, and a mild detergent solution to clean stubborn contaminants. Avoid using harsh chemicals that may damage the elastomeric spider. After cleaning, ensure that all components are completely dry before reassembly.
6.3 Lubrication
Lubrication is required for some jaw coupling designs, particularly those with metallic spiders or where the hubs come into contact with the spider. The type of lubricant should be compatible with the spider material; for elastomeric spiders, a non-petroleum-based lubricant is recommended to avoid damaging the elastomer. Lubrication should be applied every six months or 1000 hours of operation, ensuring that the lubricant reaches all contact points, including the spider lobes and shaft connections. Over-lubrication should be avoided, as excess lubricant can attract dust and debris.
6.4 Component Replacement
Elastomeric spiders are wear components and will eventually need to be replaced. The replacement interval depends on operating conditions, but a general recommendation is to replace the spider every two years or 5000 hours of operation, whichever comes first. If signs of excessive wear, cracking, or deformation are detected during inspection, the spider should be replaced immediately. Hubs should be replaced if they show signs of wear, chipping, or deformation that cannot be repaired.
When replacing components, ensure that the new spider is compatible with the coupling's design and material requirements. Proper installation is critical; the spider should fit snugly between the jaws, and the hubs should be properly aligned and secured to the shafts.
7. Common Failure Modes and Troubleshooting
Understanding common failure modes of jaw flexible couplings and their root causes is essential for effective troubleshooting and preventing future failures. The most common failure modes include spider wear/failure, hub damage, and fastener loosening.
7.1 Spider Wear/Failure
Spider failure is the most common issue with jaw flexible couplings, often caused by:
- Excessive Misalignment: Uneven wear or cracking of the spider lobes is often a sign of misalignment. This can be resolved by realigning the shafts and replacing the worn spider.
- Over-Torque: If the application's torque exceeds the coupling's rated capacity, the spider may fail prematurely. This requires selecting a coupling with a higher torque capacity or reducing the load on the system.
- Temperature Extremes: Exposure to temperatures outside the spider's operating range can cause hardening, cracking, or softening of the elastomer. The solution is to select a spider material with a suitable temperature range.
- Chemical Exposure: Contact with oils, solvents, or corrosive substances can degrade the elastomer. This requires selecting a chemical-resistant spider material or protecting the coupling with a cover.
7.2 Hub Damage
Hub damage, such as chipped or deformed jaws, is typically caused by excessive shock loads, misalignment, or improper installation. To prevent hub damage, ensure that the coupling is properly aligned, the torque load does not exceed the rated capacity, and the hubs are installed correctly with tight fasteners. Damaged hubs should be replaced, as they can cause uneven torque transmission and further damage to the spider.
7.3 Fastener Loosening
Loose fasteners can cause slippage, misalignment, and increased vibration, leading to premature coupling failure. This is often caused by inadequate tightening during installation or vibration during operation. To prevent fastener loosening, use lock washers or thread-locking compounds, and check the tightness of fasteners regularly during inspections.
8. Evolving Trends and Future Developments
The field of jaw flexible couplings is continuously evolving, driven by advancements in materials science, manufacturing technology, and the growing demand for more efficient and reliable power transmission solutions. Key trends and future developments include:
8.1 Advanced Material Development
Research is ongoing to develop new elastomeric materials with improved performance characteristics, such as higher torque capacity, wider temperature ranges, and better chemical resistance. For example, nanocomposite elastomers—incorporating carbon nanotubes or graphene—offer enhanced strength, stiffness, and durability compared to traditional elastomers. These advanced materials will enable jaw couplings to operate in even harsher environments and handle higher torque loads.
8.2 Precision Manufacturing
Advancements in precision manufacturing technologies, such as 3D printing and CNC machining, are enabling the production of jaw couplings with tighter tolerances and more complex designs. 3D printing, in particular, allows for the fabrication of custom spider geometries tailored to specific applications, improving performance and reducing lead times. CNC machining ensures that hubs are manufactured with precise jaw profiles, enhancing the coupling's torque transmission efficiency and misalignment tolerance.
8.3 Smart Coupling Technology
The integration of sensors and monitoring systems into jaw flexible couplings is a growing trend. Smart couplings can monitor key performance parameters such as torque, temperature, vibration, and misalignment in real time, providing early warning of potential failures. This enables predictive maintenance, reducing downtime and improving the overall reliability of the system. For example, sensors embedded in the spider can detect wear and send alerts when replacement is needed, while vibration sensors can identify misalignment issues before they cause damage to connected equipment.
8.4 Environmental Sustainability
There is a growing focus on developing environmentally sustainable jaw couplings. This includes the use of recycled materials for hubs and biodegradable elastomers for spiders, as well as designing couplings with longer service lives to reduce waste. Additionally, energy-efficient designs that minimize friction and improve torque transmission efficiency are being developed to reduce the overall energy consumption of mechanical systems.
9. Conclusion
Jaw flexible couplings are essential components in mechanical power transmission systems, offering a unique combination of simplicity, reliability, and versatility. Their ability to transmit torque efficiently, accommodate misalignments, dampen vibrations, and protect connected equipment makes them suitable for a wide range of applications across industrial, automotive, robotics, and renewable energy sectors. The performance of these couplings is heavily dependent on proper structural design, material selection, and maintenance practices.
As technology advances, jaw flexible couplings are evolving to meet the growing demands of modern applications. Advanced materials, precision manufacturing, smart monitoring systems, and sustainable designs are shaping the future of these components, enabling them to operate in even harsher environments, deliver higher performance, and contribute to more efficient and reliable mechanical systems. By understanding the fundamental principles, performance characteristics, and maintenance requirements of jaw flexible couplings, engineers and technicians can select the right coupling for their application, ensuring optimal performance, minimal downtime, and extended service life.
« Jaw Flexible Coupling » Post Date: 2023/7/14
URL: //5008517517.com/en/tags/JawFlexibleCoupling.html
